用于生物干预的微型生物灵感机器人
微型机器人可以通过允许医生访问人体内部的特定区域而无需高度侵入性的程序,从而在医学领域带来新的创新浪潮。这些微型机器人除其他外,还可以用于将药物,基因或其他物质携带到体内的特定部位,从而为治疗不同的医疗状况开辟了新的可能性。
苏黎世联邦理工学院和亥姆霍兹研究所埃尔兰根-纽伦堡可再生能源研究所的研究人员最近开发了受生物微泳(例如细菌或精子)启发的微米和纳米级机器人。这些小型机器人在《自然机械智能》上发表的论文中提出,具有上游运动的能力,这实质上意味着它们可以在与流体(例如血液)流动相反的方向上自主移动。这使得它们特别有希望介入人体内部。
最新论文的主要作者丹尼尔·艾哈迈德(Daniel Ahmed)表示:“我们相信,我们多学科研究中讨论的想法可以通过实现诸如靶向或精确递送药物或基因以及促进非侵入性手术等任务来改变医学的许多方面。” ,告诉TechXplore。
艾哈迈德(Ahmed)和他的同事开发的具有生物启发性的无线微/纳米系统,利用壁的防滑边界条件向上游移动,以响应外部触发的声场和磁场。通过逆着血流向上游游泳,这些机器人可以用来将小的药物分子传递到体内特别难以到达的部位。
艾哈迈德说:“外场感应机器人是一个吸引人的概念,因为它们不需要车载电源或复杂的运动部件,这意味着它们可以缩小到纳米级的分辨率。” “此外,声场和磁场对人体都是安全的,是非侵入性的,可以深入人体内部,并且在临床环境中得到了很好的发展。”
通过结合声场和磁场,研究人员设计的机器人系统可以帮助克服在其他基于单驱动技术的人工微游泳器中观察到的一些问题。此外,由于微型/纳米机器人对身体外部施加的电场做出反应,因此不需要车载电源或高度复杂且昂贵的组件。
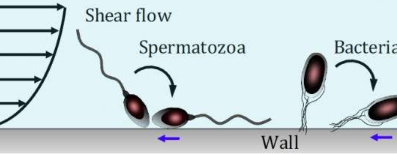
艾哈迈德解释说:“通常情况下,注射的微小药物会跟随脉管系统的血液,而对循环系统几乎没有控制。” “然而,最近的发现表明,许多自然发生的微游生物,例如细菌和精子,通过利用壁的防滑边界条件而表现出对水流的推进作用。由于壁的速度最小,因此上游运动成为可能。”
迄今为止,在医学中使用微型或纳米级机器人受到了限制,特别是在血管系统(即血液和淋巴通过其遍及全身的血管)内。原因之一是,在血管系统中操作的机器人应易于以非侵入性方式进行控制,并且应能够沿与血液流动相反的方向运动,到目前为止,这两个特征已经证明很难实现。
艾哈迈德(Ahmed)和他的同事开发的新机器人系统具有这两种特性,因为它具有上游运动的能力,并通过外部施加的声磁场进行控制。因此,在将来,这项最新研究可能会开辟新的令人兴奋的可能性,以进行有针对性的手术或通过血管系统将物质输送到体内的特定部位。
艾哈迈德说:“在小动物模型(例如大鼠,小鼠和斑马鱼)中,血流速度在几毫米-1的范围内。” “我们现在计划将我们的群体微机器人系统与适当的成像方式相结合,以可视化和导航小动物体内的机器人。能够逆流流动的能力可以为在肿瘤脉管系统的靶向治疗中提供令人兴奋的机会。”
标签: