北卡罗来纳州立大学的研究人员已经开发了蟑螂生物机器人
北卡罗莱纳州立大学的新研究提供了关于探索新的空间时,人形机器人蟑螂(或生物机器人)移动的距离和速度的见解。这项工作使研究人员更加接近使用生物机器人探索倒塌的建筑物和其他空间以识别幸存者的目标。
北卡罗来纳州立大学的研究人员已经开发了蟑螂生物机器人,该机器人可以进行远程控制并搭载可用于在灾难发生后绘制灾区地图和识别幸存者的技术。
为了使这项技术可行,研究人员需要回答有关生物机器人如何在不熟悉的地区移动以及在何处移动的基本问题。即将发表的两篇论文讨论了这些问题。
第一篇论文回答了有关生物机器人技术是否可以准确确定生物机器人如何以及是否在移动的问题。
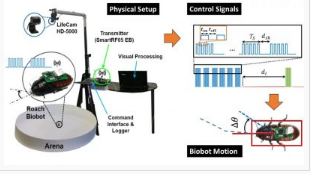
研究人员目视跟踪生物机器人的运动,并将其实际运动与生物机器人惯性测量单元报告的运动进行了比较。研究发现,生物机器人技术是生物机器人运动方式的可靠指标。
第二篇论文提出了更大的问题:生物机器人将走多远?多快?当允许生物机器人在无人指导的情况下移动时,生物机器人在探索太空方面是否更有效率?还是可以使用远程控制命令来加快该过程?
这些问题很重要,因为答案可以帮助研究人员确定在给定的时间内有效地探索该地区可能需要引入多少个生物机器人。
研究人员发现,不受引导的生物机器人更喜欢拥抱圆圈壁。但是,通过向生物机器人发送随机命令,生物机器人花费了更多的时间移动,移动得更快,并且离开墙壁进入开放空间的可能性至少高出五倍。
“我们的早期研究表明,我们可以使用神经刺激来控制蟑螂的方向,并使之从一个点移到另一个点,” NC State的电气和计算机工程副教授,《科学》杂志的合著者Alper Bozkurt说。这两篇论文。“ [第二项]研究表明,通过随机刺激蟑螂,我们可以从它们的自然行走和直觉中受益,以搜寻未知区域。他们的电子背包可以启动这些脉冲,而无需我们看到蟑螂在哪里,而是让他们自主地扫描区域。”
“这是实用的信息,我们可以用来让生物机器人更快地探索太空,”北卡罗来纳州立大学电气与计算机工程助理教授,两篇论文的合著者埃德加·洛巴顿(Edgar Lobaton)说。“当您认为时间对于在灾难后挽救生命至关重要时,这一点尤其重要。”
第二篇论文的主要作者是“对定向神经刺激做出反应的生物运动和行为分析”,他是前NC状态博士。学生Alireza Dirafzoon。该论文由前博士Latif合着。龚凤远,电机和计算机工程教授Mihail Sichitiu,Bozkurt和Lobaton的学生。
这两篇论文将在3月5日至9日在新奥尔良举行的第42届IEEE国际声学,语音和信号处理会议上发表。
这项工作是在国家科学基金会的资助1239243下完成的。
标签: 蟑螂生物机器人