蟑螂机器人用麦克风检测跟踪声音
北卡罗莱纳州立大学的研究人员已经开发出了使半机械人蟑螂或生物机器人能够通过小型麦克风拾取声音并找出声音来源的技术。该技术旨在帮助紧急情况下的人员在灾难后找到并营救幸存者。
研究人员还开发了可用作“隐形篱笆”的技术,以将生物机器人保持在灾区。
“在倒塌的建筑物中,声音是找到幸存者的最佳方法,”北卡罗来纳州立大学电气和计算机工程助理教授,有关该工作的两篇论文的资深作者阿尔珀·博兹库特博士说。
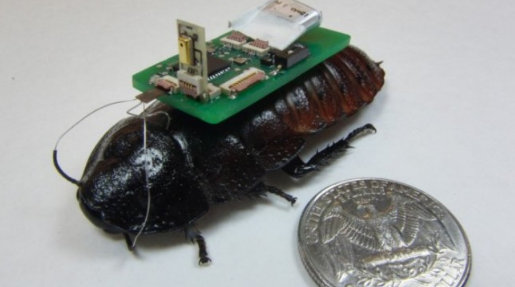
生物机器人配备了可控制蟑螂运动的电子背包。Bozkurt的研究团队使用麦克风创建了两种类型的定制背包。一种类型的生物机器人具有单个麦克风,该麦克风可以捕获来自任何方向的相对高分辨率的声音,以无线方式传输到第一响应者。
第二种类型的生物机器人配有三个定向麦克风的阵列,用于检测声音的方向。该研究小组还开发了算法,该算法可以分析来自麦克风阵列的声音,以定位声音的来源,并朝着该方向操纵生物机器人。该系统在实验室测试期间运行良好。以下是麦克风阵列系统的实验室测试视频:
“目标是使用带有高分辨率麦克风的生物机器人,在重要的声音(如人们需要帮助的声音)与无关紧要的声音(如管道泄漏)之间进行区分,” Bozkurt说。“一旦我们确定了重要的声音,我们就可以使用配备了麦克风阵列的生物机器人将这些声音的来源归零。”
由埃德加·洛巴顿(Edgar Lobaton)博士领导的研究小组此前已经证明,生物机器人可以用于绘制灾区地图。由美国国家科学基金会网络物理系统计划资助的长期目标是,使Bozkurt和Lobaton合并他们的研究成果,以绘制灾区图并确定幸存者。研究人员已经在与合作者Mihail Sichitiu博士合作开发下一代生物机器人网络和本地化技术。
Bozkurt的团队最近还展示了一种技术,该技术可以创建一个看不见的围栏,以将生物机器人保持在特定区域。这很重要,因为它可用于将生物机器人保持在灾难现场,并将生物机器人保持在彼此的范围内,从而可以将它们用作可靠的移动无线网络。该技术还可用于将生物机器人引导到光源,以便可以对生物机器人背包上的微型太阳能电池板进行充电。实际中的隐形围栏技术视频可以在下面看到:
11月5日,在西班牙巴伦西亚举行的IEEE传感器2014年会议上,发表了有关麦克风传感器研究的论文“用于生物搜索和救援的声学传感器”。该论文的主要作者是美国前州立大学的前本科生埃里克·惠特米尔(Eric Whitmire)。该论文由Tahmid Latif博士合着。北卡罗来纳州立大学和Bozkurt的学生。
8月28日,在伊利诺伊州芝加哥举行的第36届国际IEEE EMBS大会上,发表了有关生物机器人的无形栅栏的论文“迈向太阳能昆虫生物机器人的无障碍边界”。Latif是第一作者。合著者包括北卡罗来纳州立大学的研究生Tristan Novak,Whitmire和Bozkurt。
标签: 蟑螂机器人