科学家使用形态学计算创造了一个跳跃机器人
生物机电一体化和节能机器人国际实验室创造了一个节能跳跃机器人的原型。该设计基于柔性接头和一系列弹性执行器。
仿生原理
由控制系统与机器人学院的硕士生Kirill Nasonov和Dmitry Volyansky组成的团队,在 ITMO 大学助理研究员Ivan Borisov 的指导下,正在研究具有独特形态特征的疾驰机器人。团队的主要任务是开发一个轻便、灵活、节能、功能齐全的系统。为了实现这一点,他们使用了仿生学和形态学计算的原理。根据伊万鲍里索夫的说法,目标是创造一种设备,它需要尽可能少的控制力(能量),同时能够克服不平坦的地形、克服障碍并能够抵御物理伤害。
我们的任务是开发方法来设计能够在非结构化和意外环境中运行的机器人。作为方法和设计原则认可的平台,我们正在开发一种可以快速移动并且消耗很少能量的疾驰机器人。现代有腿机器人,如 Spot 或 Unitree,通常看起来像一个带腿的凳子——一个绝对刚性的身体,带有开放的运动学腿。他们已经证明了自己的效率:他们可以走路、跑步、攀爬和做空翻,但他们也浪费了很多能量。跑步是一种周期性运动。当它们跑步时,它们的开放式运动腿的机制会进行振荡运动。所以他们在跑步周期的每个阶段都浪费能量:他们需要它来加速、减速、向相反方向加速、再次减速,然后循环继续。
然而,我们想要实现的是节能运动。我们应用仿生学的原理,例如,我们观察大自然如何在数百万年的进化过程中解决类似的任务,并将生命系统的独特特征传输到机器人技术中。最节能和最明显的运动方式之一是袋鼠跳跃。这些动物撞击地面时,其动能转化为储存在肌腱和肌肉中的势能。当他们再次跳跃时,它又转化为动能。我们在原型中使用了类似的原理,”Ivan Borisov 评论道。
形态设计
能源效率意味着最有效地使用有限的能源预算。为了最大限度地减少电机的控制工作,可以创建一个机器人,其大部分所需行为已经存在于机械系统的固有动力学中,而控制算法只需要激发、稳定和增强自然动力学不费吹灰之力。这种设计原理称为形态计算,当控制信号的计算不仅通过算法而且通过机械结构(例如其形态)进行时。由于质量、弹性的最佳分布和机械参数的优化,可以用越来越少的功率电机实现所需的动力学。
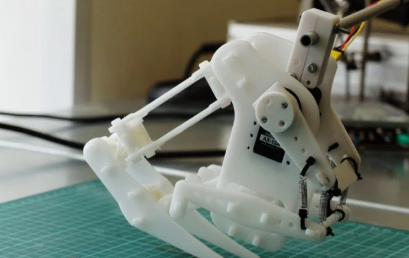
“这个系统中的主要执行器是一个拉簧:当机器人碰到地面时,它会伸展并积累势能,当它再次跳起来时,储存的能量又会转化为动能。因此,能量得到回收,电机只需补偿由冲击和摩擦引起的能量损失,”伊万鲍里索夫解释说。
此外,机器人的身体必须轻得多,这意味着摆脱齿轮、金属轴和轴承部件等重量元素。为了做到这一点,该团队使用了 ITMO 合作伙伴特温特大学(荷兰)的研究成果。
“我们有一个关于柔性关节的假设:它们可以以一定的角度旋转,它们很轻,并且它们没有摩擦和反冲。然后我们必须考虑如何设计它们。设计关节的任务非常重要——我们不能只取一些塑料零件并以一定角度连接它们——它应该通过数学计算。特温特大学有一个从事这一领域的实验室,对我们来说幸运的是,他们的研究对公众开放。我们可以看到他们是如何做到的,并在此基础上找到我们的解决方案,”Kirill Nasonov 说。
在Dannis Brouwer 教授领导的特温特大学实验室,主要是为了高精度运动而合成具有柔性关节的机构。在 ITMO 的项目中,该机制被合成以达到机器人与环境的物理交互。关节由聚氨酯 3D 打印而成,聚氨酯是一种具有拉伸结构的柔性塑料。它们具有几何三部分形状,为该机构提供灵活性、弹性和抗变形能力。
其余部分也是塑料的:车身的元件和链节是用激光从聚缩醛上切割下来的,然后用塑料夹组装在一起。
跳跃机器人不是最终产品,而是更多地测试形态设计方法和特别是柔性关节的对象。以前没有以这种方式设计过类似的机器人。此外,疾驰机器人是研究控制方法以及高动态系统如何与环境相互作用的一个很好的例子。
“我们使用串联弹性执行器,并实施了一种控制方法,不是通过位置误差,而是通过存储在弹簧中的势能误差。我们团队的学生正处于硕士学习的第一年末,这是他们在此期间工作的结果。他们能够在实践中测试创新建模、非标准控制方法、设计、零件生产的技能,还掌握了对控制器进行编程的技能,”Ivan Borisov 说。
该团队计划打造一个机器人,不仅可以原地跳跃,还可以在不平坦的地形上移动。为此,他们需要合成一种能够配置运动轨迹的更复杂的机制。
标签: 跳跃机器人