使用集成机械智能和控制的仿生蝙蝠机器人的方向稳定
发布日期:2021-09-14 16:15:03 来源: 编辑:
微型飞行器可用于使居住空间更安全、更高效;然而,目前的空中机器人对人类来说可能是危险的,并且操作时间有限。最近的一项研究探索了模仿蝙蝠翅膀来制造安全、敏捷和节能的无人机的可能性。
蝙蝠在一次翅膀拍打中可以活动多达 40 个关节;因此,闭环反馈角色无法复制蝙蝠飞行。研究人员提出了一种结合形态智能的新型控制设计框架。反馈驱动组件用于通过形态变化来调整机器人的步态。
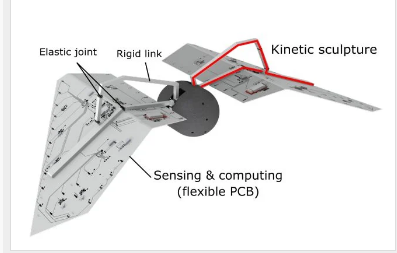
该框架适用于最新的变形周设计 Aerobat。它使用计算结构,使用刚性和柔性材料整体制造。结果表明,所提出的框架能够稳定 Aerobat 的纵向动力学。
我们在这项工作中的目标是通过解决与蝙蝠空中运动的机器人仿生学相关的关键挑战来扩展机器人运动的理论和实践。蝙蝠的翅膀表现出快速的翅膀关节,可以在一次翅膀拍打中调动多达 40 个关节。模仿蝙蝠飞行可能是一个重大的考验,目前的设计范式已经失败,因为它们仅通过传感器和传统执行器承担闭环反馈作用,而忽略了形态所承载的计算作用。在本文中,我们提出了一个名为 Morphing via Integrated Mechanical Intelligence and Control (MIMIC) 的设计框架,该框架集成了小型低能量执行器,通过形态变化来控制机器人。在本文中,利用东北大学的 Aerobat 动力学模型,
标签: