开发适合人群的机器人轮椅
机器人轮椅可能很快就能顺利安全地穿过人群。作为资助项目CrowdBot的一部分,EPFL研究人员正在探索与此类技术相关的技术、道德和安全问题。该项目的目的是最终帮助残疾人更轻松地出行。
洛桑每周户外市场的购物者可能在过去几周遇到了EPFL的一项发明——一种新奇的设备,部分是轮椅,部分是机器人。EPFL学习算法和系统实验室(LASA)的研究人员正在使用它来测试他们在CrowdBot下开发的技术,这是一个由INRIA领导的项目,涉及包括EPFL在内的七个研究组织的财团。
该项目已获得“地平线2020”计划在信息和通信技术(ICT)部分的资助。CrowdBot旨在测试让机器人穿过拥挤区域的技术和道德可行性。这些机器人可以是类人机器人、服务机器人或辅助机器人。LASA负责人奥德·比拉德(AudeBillard)说:“你听说过很多关于自动驾驶汽车的事情,但没有听说过可以在行人中移动的机器人。”“然而,机器人技术显然正朝着这个方向发展,所以我们现在必须开始思考这将意味着什么。”
许多可能的场景
在正在研究的各种问题中,最明显的是机器人用户及其附近人员的安全。LASA研究人员发现现有立法并未解决这一问题,并开始研究所有可能的风险,包括与人类发生碰撞的风险。
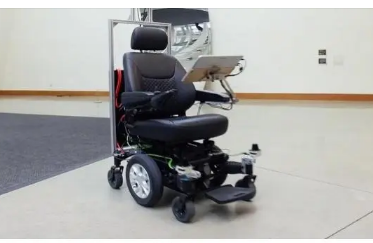
科学家们选择了一个名为Qolo(运动生活质量的缩写)的机器人来进行风险评估。Qolo最初是在筑波大学开发的,旨在用作残疾人的站立轮椅。它包含两个电动轮子和一个被动外骨骼,让佩戴者可以轻松地从坐姿移动到站立姿势。
LASA团队在伯尔尼对他们的Qolo进行了碰撞测试。“我们用两种假人进行了测试,因为碰撞的影响可能会根据人的身高而有所不同,”LASA的博士后DiegoPaez说。“以儿童为例,最脆弱的部位是头部,而孕妇则是腹部。”研究人员发现,即使机器人速度较低(例如低于6公里/小时)发生碰撞也会造成严重伤害。这使得防止这些碰撞变得更加重要。
第一步是修改Qolo,使其能够分析周围环境并做出反应。科学家们为机器人配备了各种传感器,包括正面的摄像头和前后带有激光的激光雷达系统。“对于机器人来说,拥有360°的周围环境非常重要,这样它才能避开它前面和后面的障碍物。它还需要知道它后面的东西,以防它必须快速后退以避免碰撞,“佩兹说。“激光雷达系统检测到各种障碍物,摄像头让机器人知道障碍物是否是行人。”
该团队还在Qolo的前部安装了保险杠。“保险杠告诉机器人它与某物接触并测量接触力,以便在机器人仍在移动时将最大力保持在非常低的水平,”Paez说。换句话说,Qolo没有被编程为在遇到障碍物时停止,而是绕着它移动。“对于靠近机器人的人来说,在人群中间突然停下来可能更加危险,”他说。
来自Qolo传感器的数据与人员检测和跟踪算法相结合,以估计机器人周围有多少人以及他们正在移动的方向。LASA研究人员为Qolo开发了一种特殊的导航算法,可以让它识别出最佳路径只需几毫秒,这意味着它可以在拥挤的人群中快速响应。
预测不可预知的
尽管工程师们技术精湛,但他们的机器人(还)不能预测突然的运动,比如方向的快速变化。“我们无法真正模拟人们在不同情况下会做什么,因为每个人的反应都不一样。这就是为什么我们需要在现实条件下测试Qolo,”Paez说。因此,该试验在洛桑的公开市场进行。
在那里,工程师可以获得关于机器人所有系统(从硬件到算法)以及用户体验的宝贵反馈。初步结果很有希望;行人似乎在机器周围表现正常,这对数据收集来说是一大优势。“我们仍然需要分析数据,但机器人的半自主维度似乎运作良好,”Paez说。Billard补充说:“用户通过移动躯干来引导Qolo指示前进的方向。如果突然出现障碍物,机器人会立即做出反应以避开它。这种辅助导航对于残疾人来说是一个真正的优势。”
风险意识
随着机器人技术的快速发展,我们可以开始在道路和人行道上看到越来越多的此类设备,例如送货机器人。尽管如此,LASA团队还是强调了一个关键点:开发有效的方法来最大限度地减少碰撞和其他事故的可能性至关重要。“碰撞测试表明,受伤的风险可能很高,有时甚至超过汽车允许的范围,”Paez说。
“现在我们需要开发一种控制系统来降低这种风险,无论是通过降低机器人的速度还是提高其减震能力,”Billard说。“在未来的立法中考虑这些调查结果至关重要。这些法律可能包括为Qolo等辅助机器人设置速度限制,或限制某些类型的车辆(如送货机器人)在人流频繁的区域运行的能力。"
标签: