软辅助机器人可穿戴设备从快速设计工具中获得提升
柔软的气动执行器可能不会出现在日常对话中,但您很可能会从它们的实用性中受益。这些设备使用压缩空气为运动提供动力,并具有传感功能,已被证明是辅助可穿戴设备、机器人技术和康复技术等各种应用中的关键支柱。
但是在创建具有高响应率和功率输入比等优点的小型动态设备时存在一些瓶颈。他们需要手动设计和制造流程,这意味着需要大量的试错周期来实际测试并查看设计是否可行。
麻省理工学院计算机科学与人工智能实验室(CSAIL)的科学家设计了一种可扩展的管道,用于计算设计和数字化制造称为“PneuAct”的软气动执行器。
PneuAct使用机器编织工艺,与您奶奶的塑料针编织没有什么不同,但是这台机器是自主运行的。人类设计师只需在软件中指定针迹和传感器设计模式,即可对执行器的移动方式进行编程,然后可以在打印前对其进行模拟。纺织片由针织机制造,可以固定到便宜的现成橡胶硅胶管上以完成执行器。
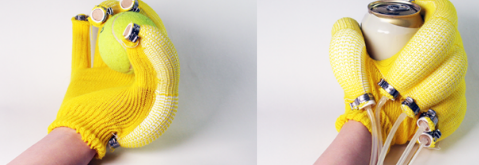
针织致动器集成了用于感应的导电纱线,使致动器能够“感受”它们所触摸的东西。该团队制作了几个原型,包括辅助手套、柔软的手、交互式机器人和气动行走四足动物。他们的原型使用黄色织物,看起来有点像香蕉手指,横跨辅助手套、柔软的手、交互式机器人和气动四足机器人。
尽管多年来软气动执行器的硬件开发发生了很多变化——2019年协作机器人的原型使用这种执行器来重现人类手中的抓握——但设计工具并没有以同样快的速度改进.旧工艺通常使用聚合物和成型,但科学家们使用了弹性和感应缝线(带有导电纱线)的组合,允许在致动器充气时对致动器的弯曲进行编程,并能够结合真实世界的反馈。
例如,该团队使用执行器构建了一个机器人,当它被人手特别触摸时,它会感知并对该触摸做出反应。
该团队的手套可以由人类佩戴以补充手指肌肉运动,最大限度地减少完成任务和动作所需的肌肉活动量。对于那些手指受伤、行动不便或其他创伤的人来说,这可能具有很大的潜力。该方法还可用于制造外骨骼(由计算机控制的可穿戴机器人单元,可补充人体运动并恢复运动和运动);例如,作者创造了一种袖子,可以帮助佩戴者弯曲肘部、膝盖或其他身体部位。
麻省理工学院CSAIL博士生、《新关于研究的论文。“软气动执行器本质上是兼容和灵活的,并且与智能材料相结合,已成为许多机器人和辅助技术的支柱——使用我们的设计工具进行快速制造有望提高易用性和普遍性。”
理解传感器
该团队采用的一种传感方式是“电阻式压力传感”,执行器“发送”压力。例如,在制造机器人抓手时,当它抓住某物时,压力传感器会感应到物体上施加了多少力,然后会尝试查看抓取是否成功。另一种类型是“电容式传感”,其中传感器识别执行器接触的材料的一些信息。
虽然执行器很坚固——在他们的任何实验中都没有断线,但该系统的一个限制是它们仅限于管形执行器,因为它很容易现成购买。合乎逻辑的下一步是探索不同形状的执行器,以避免受到单一结构的限制。科学家们将探索的另一个扩展是扩展该工具以结合任务驱动、基于优化的设计,用户可以指定目标姿势和可以自动合成的最佳缝合图案。
“我们的软件工具快速且易于使用,可以准确地预览用户的设计,让他们能够快速进行虚拟迭代,而只需要制作一次。但是这个过程仍然需要人类进行一些反复试验。计算机能否解释如何在执行器中对纺织品进行物理编程以实现丰富的、传感驱动的行为?这是下一个前沿领域,”该论文的另一位作者、哈佛大学材料科学与机械工程博士后研究员安德鲁·斯皮尔伯格说。
由雷切尔·戈登撰写
标签: