使用常识推理整理虚拟家庭
发布日期:2022-05-30 16:38:54 来源: 编辑:
能够在没有明确指示的情况下清理房屋的机器人在日常生活中会很有用。arXiv.org 上最近的一篇论文提出了 Housekeep 任务,以衡量具身AI 代理使用物理常识推理和推断模仿人类在室内环境中首选物体放置的重新排列目标的能力。
研究人员收集了人类在整洁和不整洁的房屋中放置物体的偏好数据集。他们提出了一个模块化基线,并证明从大型语言模型 (LLM) 中提取的具体常识是拟议任务的有效规划器。结果表明,该方法可以推广到重新排列看不见的对象,而无需访问显式指令。
需要进一步研究开发探索模块,以便代理可以更频繁地访问杂乱无章的区域和推理模块,以提高识别放错对象的精度。
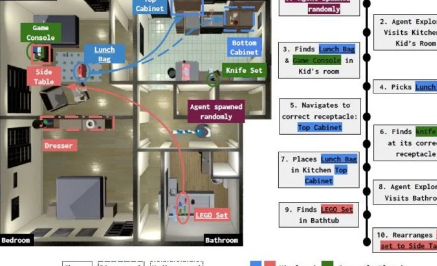
我们介绍了 Housekeep,这是一个评估家中体现人工智能的常识推理的基准。在 Housekeep 中,具体化的代理必须通过重新排列放错位置的物体来整理房子,而无需明确说明需要重新排列哪些物体。相反,代理必须从人类偏好中学习并根据人类偏好来评估哪些物体属于整洁的房子中的哪个位置。具体来说,我们收集了一个数据集,其中人类通常将物体放置在整洁和不整洁的房屋中,包括 1799 个物体、268 个物体类别、585 个放置位置和 105 个房间。接下来,我们为 Housekeep 提出了一种模块化基线方法,该方法集成了规划、探索和导航。它利用在互联网文本语料库上训练的微调大型语言模型 (LLM) 进行有效规划。我们表明,我们的基线代理可以泛化为在未知环境中重新排列看不见的对象。
标签: