机器人群的化学启发模式形成
发布日期:2022-06-14 16:59:07 来源: 编辑:
大量粒子的系统动态相互作用并成对产生复杂的图案;例如,分子结构是根据环境条件从原子相互作用中产生的。对此类系统的研究可应用于模式形成问题中的群体机器人技术。
arXiv.org 最近的一篇论文通过依赖于粒子相互作用和分子结构形成中的理论创建了一个适用于机器人群的简化模型。一种新颖的随机和分散方法允许大量异质机器人出现有趣的模式,完全依赖于与邻居的本地交互。
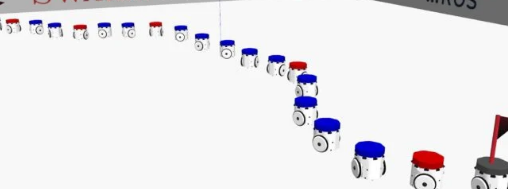
使用数值模拟的实验证实了该方法通过仅设置最大键约束来产生不同图案的多功能性。进行了物理模拟和真实机器人实验,以表明群体可以构建链状结构。
自组织的涌现模式可以广泛地出现在产生复杂结构(如化学元素和分子)的粒子相互作用中。受这些交互的启发,这项工作提出了一种新颖的随机方法,该方法允许一群异构机器人以完全分散的方式创建紧急模式,并且仅依赖本地信息。我们的方法包括将群配置建模为动态吉布斯随机场 (GRF),并在邻域系统上设置约束,该约束受到指示粒子之间结合极性的化学规则的启发。使用 GRF 模型,我们确定每个机器人的速度,从而产生导致创建图案或形状的行为。模拟实验表明该方法在产生各种图案方面的多功能性,
标签: