一种增强多指机器人手部操作的新方法
近年来,机器人专家开发了越来越先进的机器人系统,其中许多具有人造手或多指机器人手。为了完成家庭和公共场所的日常任务,机器人应该能够使用它们的“手”来有效地抓取和操纵物体。
然而,到目前为止,在机器人中实现涉及多个手指的灵巧操作已被证明具有挑战性。这主要是因为它是一项高级技能,需要适应物体的形状、重量和配置。
汉堡大学的研究人员最近推出了一种新方法,可以教机器人使用多指机械手抓取和操纵物体。这种方法在IEEE Transactions on Neural Networks and Learning Systems中引入,允许机器人手通过远程操作向人类学习,并根据人类手部姿势和与环境交互时收集的数据调整其操作策略。
“这项研究背后的最初想法是开发一种远程操作系统,可以将人类的手部操作技能转移到多形机器人手上,这样人类用户就可以教机器人手在线执行任务,”该研究的成员之一曾超博士说。进行这项研究的研究人员告诉 TechXplore。“我们的工作有两个基本目标。首先,与其他最先进的方法不同,我们不想戴上带有光学标记的手套。”
Zeng 和他的同事希望他们的机器人通过观看人类演示来获得灵巧的操作技能。然而,他们并没有像之前的其他研究那样强迫正在训练机器人的人类用户戴上带有光学标记的手套,而是希望用户能够自由移动他/她的手指,而没有任何物理限制。
相反,他们使用相机来捕捉人类用户的手部姿势的图像。这被证明是相当具有挑战性的,但他们最终能够取得可喜的成果。
“我们的第二个目标是使用机器手来实现顺从行为,就像我们人类一样,这样它就能够以预期的灵巧度处理身体接触丰富的交互任务,”曾解释说。
在他们之前的工作中,研究人员发现控制机器人抓取或握住物体的力有助于获得更顺从的操作技能。这些技能在需要与物体进行物理交互的任务中尤为重要,例如切割、锯切或将物体插入物体内部。
“在这项研究中,我们还想在机器人手上采用力控制,”曾说。“然而,直接训练深度神经网络 (DNN) 以在运行时为机器人生成所需的力控制命令具有挑战性。为了解决这个问题,我们采取了两步法。”
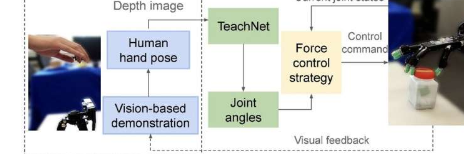
Zeng 和他的同事设计的方法的第一步是捕捉人类用户的姿势,并使用 DNN 将其映射到机器人的关节角度上。他们的模型是根据他们在模拟过程中收集的数据进行训练的。经过训练,它可以有效地分析人类用户的手部图像,并为机器人的手部生成匹配的关节角度。
信用:曾等人。
“作为第二步,我们设计了一种力控制策略,可以在给定当前参考角度的情况下预测每个时间步所需的力命令,”曾说。“我们的方法的两个组件可以无缝集成到远程操作系统中,以提高机械手的顺应性,正如我们开始做的那样。”
研究人员在一系列测试中评估了他们的方法,包括在模拟和现实世界环境中使用影子手,这是一种在大小和形状上都类似于人类手的机器人系统。他们的结果非常有希望,因为他们的模型明显优于广泛使用的顺从机器人操作方法,从而产生更有效的操作策略。
“我们提出的系统可以仅依靠视觉数据用于机器人手遥操作,它可以在模拟和现实世界的任务中工作,”曾说。“我们的工作是一种有趣的尝试,将高级学习和低级控制集成到机器人操作中。虽然这种集成看起来有些简单,但它确实可以提高机器人的顺从操作能力。”
未来,这组研究人员引入的新方法可能有助于提高现有和新开发的人形机器人的操作技能。此外,它可能被证明是一种很有前途的策略,可以缩小深度学习和基于控制的方法之间的差距,融合两者的优势以提高机器人的能力。
“我们目前的远程操作系统并不完善,有几个方面可以改进,”曾补充说。“例如,它在远程操作过程中缺乏沉浸感,而 VR/AR 可用于改善人类用户体验。在我们接下来的研究中,我们计划探索这些可能性并训练一个更好的神经网络模型,该模型可以泛化到不同大小的不同人手上. 我们也在考虑跟踪机器人手臂的可能性,以实现机器人手臂-手远程操作,以进行顺从操作。”
标签: