观看体积比猎豹更快的微型机电机器人
奥地利约翰内斯开普勒大学的一组研究人员开发了一系列微型、可操纵的机电机器人,这些机器人可以按照它们的大小高速行走、跑步、跳跃和游泳。在他们发表在《自然通讯》杂志上的论文中,该小组描述了他们如何建造机器人并提出了可能的用途。
正如研究人员指出的那样,许多动物可以快速移动——例如猎豹或瞪羚。这些特征已经进化到帮助动物捕获猎物或逃避捕食者的捕获。多年来,制造具有相似速度能力的机器人一直是科学家的目标,但事实证明,实现这一目标很困难。在这项新的努力中,研究人员使用柔软的微型电磁致动器制造了一系列机器人,这些致动器带有嵌入式液态金属线圈,这些线圈的尺寸与其尺寸相称。
为了制造他们的机器人,研究人员将液态金属线圈印刷到具有不同理想特性(例如可弯曲性)的不同基板上。线圈的印刷方式允许以所需方式操纵基板的不同部分——例如,仅弯曲一个部分可以让后端在像鱼一样游泳时像尾巴一样摆动。弯曲其他部分允许行走、跳跃和转向。研究人员还添加了其他元素来提高性能,例如锯齿形或L形脚。所有的机器人都使用磁场进行控制,并通过系绳或电池组供电。
研究人员使用每秒身体长度(BL/s),这不仅可以与其他微型机器人进行比较,还可以与各种尺寸的机器人甚至动物进行比较。例如,一级方程式赛车可以以大约50BL/s的速度行驶。
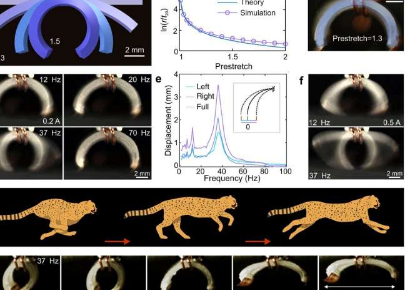
在测试他们的机器人时,研究人员发现他们的邮票大小的系留跑步机器人在其最佳表面上可以以大约70BL/s的速度移动,在任意表面上可以以大约35BL/s的速度移动——它的无系绳机器人,背负着一个电池组,只能管理2.1BL/s。他们还发现他们的系绳游泳机器人可以以大约4.8BL/s的速度游泳。从结果来看,猎豹的运行速度在20到30BL/s之间。
标签: