一种自动无人机视点支持远程机器人操作的方法
发布日期:2022-08-12 16:28:50 来源: 编辑:
远程遥控机器人适用于许多非结构化和无法访问的环境。这项任务需要足够的态势感知来进行操作,而这会受到缺乏视觉信息的影响。
自动无人机可以根据可用的环境和任务选择视点。然而,这种方法也带来了一些挑战,例如当有多个质量视点时如何选择一个视点。
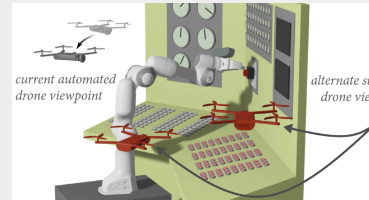
arXiv.org最近的一篇论文提出了一种方法,该方法将人工切换自动生成的无人机视点与考虑遮挡、碰撞和无人机不确定性的其他自动无人机视图相结合。
该方法结合了一组非线性优化目标,这些目标用于控制无人机并搜索并向操作员提出替代观点的局部全局优化。研究人员提供了一个开源实现和对所提出方法的初步验证。
无人机可以提供最小约束的自适应摄像机视图以支持机器人远程操作。此外,无人机视图可以自动化,以减轻远程操作期间操作员的负担。然而,现有的方法并不关注使用无人机作为自动视图提供者的两个重要方面。首先是无人机应如何从工作空间内的一系列质量视点(例如,物体的相对侧)中进行选择。二是如何补偿无人机在确定视点时不可避免的姿态不确定性。在本文中,我们提供了一种非线性优化方法,该方法可产生有效且自适应的无人机视点,用于使用铰接式机械手进行远程操作。我们的第一个关键想法是使用稀疏的人工在环输入在多个自动生成的无人机视点之间切换。我们的第二个关键想法是引入优化目标,在考虑无人机不确定性以及对视点遮挡和环境碰撞的影响的同时保持操纵器的视野。我们在无人机操纵器远程远程操作系统中提供了无人机视点方法的实例化。最后,我们在完成常见家庭和工业操作的任务中对我们的方法进行了初步验证。
标签: